|
I am a PhD Student in Computer Vision at Cornell University, where I am advised by Serge Belongie. Prior to starting my PhD, I spent time as a software engineer at Uber, Apple, and Tubemogul (acquired by Adobe). I completed my Bachelors in EECS at UC Berkeley where I was fortunate to be advised by Claire Tomlin , Tapan Parikh , and Alice Agogino . Email / CV / Google Scholar / LinkedIn / Twitter |

|
|
I am currently interested in computer vision and artificial intelligence. In the past, my research interests were in control theory, ICTD, and energy systems. |
|
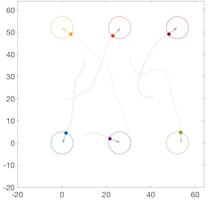
Hamilton-Jacobi (HJ) reachability has successfully provided safety guarantees to small-scale systems and is flexible in terms of system dynamics. However, it becomes exponentially intractable when the number of vehicles is greater than two. We proposed a collision avoidance algorithm using a hybrid framework for N + 1 vehicles through higher-level control logic given any N-vehicle collision avoidance algorithm. (* Equal contribution) |

|
Unmanned aerial vehicles (UAVs) are becoming immensely popular. As more projects like Amazon Prime Air and Google Project Wing begin to use UAVs for civilian services, Unmanned aerial systems Traffic Management (UTM) is needed to manage potentially thousands of flying vehicles to guarantee liveness and safety requirements. Using Hamilton-Jacobi (HJ) reachability analysis, airspace structure, and higher-level logic, safety and liveness for large numbers of vehicles can be guaranteed. One such approach is through platooning. We worked on the hardware implementation using Crazyflie 2.0 as a proof of concept. |

|
We worked with Berkeley Represent Lab to design and develop ICTs to increase smallholder farmers access to markets and knowledge. We worked on building a smart rainfall sensor and the accompanying software to increase agricultural small-holder productivity, profitability, and sustainability. Our aim was to predict the most lucrative crops based on water sensors and weather data. This research project was eye-opening to interdiscplinary research. We collaborated with a Kenyan farmer collective, and built a prototype. |
|
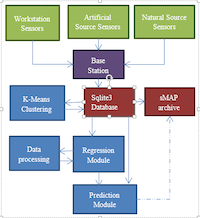
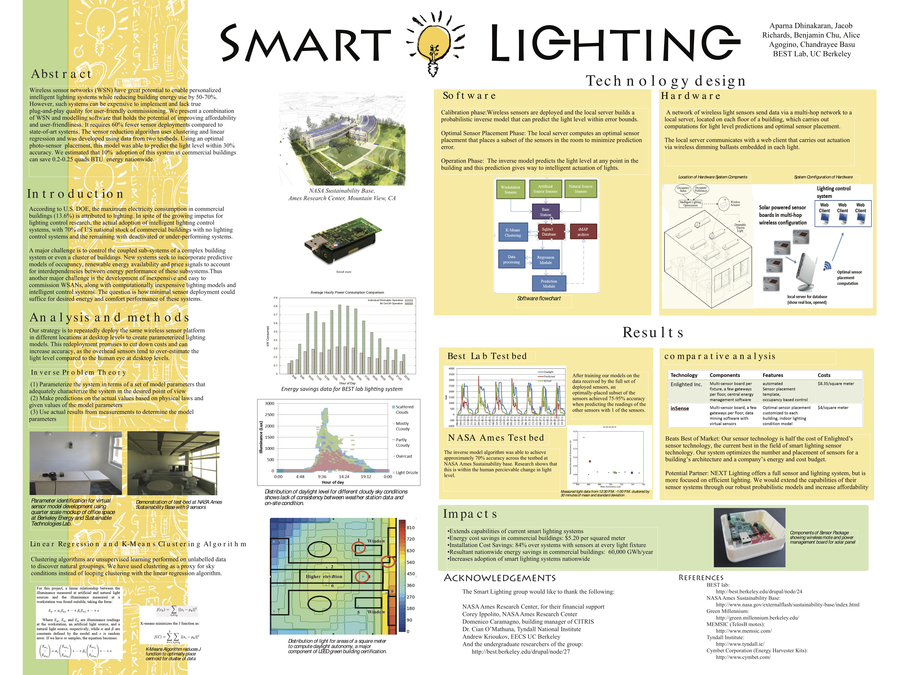
The Berkeley Energy and Sustainable Technologies Laboratory (BEST Lab) has demonstrated that retrofitting zonal lighting control systems with wirelessly actuated, user-controlled, individually dimmable luminaires in offices can save 50% of the office's electricity usage. User-centric model-predictive lighting retrofit system is an innovative approach to address the current deficiencies in intelligent lighting retrofits and also adds novel capabilities to the retrofitted system. Our primary contribution is in the development of a new framework/method for retrofitting that includes a combination of new hardware and software components. I worked on the software implementation of this project, which included the database infrastructure, regression models, and K-Means clustering, and installation software. For more information, visit here. |
{kind=link}
|
Website Template by Jon Barron |